联系人:刘霞
电话: 13621153779
E-mail:smliuxia@163.com
一、 研究背景
中国科学院空天信息创新研究院(原中科院光电院)与芬兰FGI联合共建了“光电载荷信息获取与质量控制中芬联合实验室”。在中芬联合实验室和相关科研项目的支持下,空天院研制的微小型、低功耗无人机载/车载激光雷达系统“AoEagle光电鹰”与传统三维激光扫描系统相比,具有重量轻、功耗低、适应性广等特点。在该系统的测试试验及产品应用推广过程中,主要针对三维数字城市建设、电力线巡查及周边环境安全评估、林业资源普查及考古现场地形变化智能监测等典型应用场景设计了专用的应用方案来完成数据采集、数据处理,并在真实的应用环境中对系统能力进行了验证,其成果取得了显著的社会效益,应用前景广阔。

图1 “AoEagle光电鹰”系统主机
二、 系统简介
最新优化升级的系统重量仅3.5kg、总功耗13W,最大作用距离可达200m。
表1 系统性能参数
|
系统性能 |
|
|
重量 |
3.5kg |
|
功耗 |
13W |
|
角分辨率 |
0.125° |
|
测距范围 |
200m |
|
视场角 |
110° |
|
测量速度 |
40000pts |
|
测距分辨率 |
4cm |
|
扫描线数 |
8 |
|
激光波长 |
905nm |
|
多回波采集数 |
3 |
|
姿态精度 |
方位:0.08° 俯仰/横滚:0.015° |
|
位置精度 |
水平:2cm 垂直:2cm |
得益于轻巧、低功耗的设计,该系统能够根据不同应用需求灵活搭载于各种移动平台(多旋翼/固定翼无人机、汽车、无人飞艇、舰船等),实现各类复杂环境下的高密度、高精度激光雷达点云数据快速获取。所获取的数据可用于地形快速测量、建筑三维重建、森林资源调查、植被分析、电力巡线、文物保护、灾害救援应急监测、次生灾害识别、灾情应急评估等领域。

图2 六旋翼无人机载搭“AoEagle光电鹰”系统实物图
表2 无人机平台解决方案及可选配件
|
无人机解决方案案例 |
|
|
全系统重量 |
18kg(含无人机和载荷) |
|
无人机最大载荷 |
6kg |
|
续航时间 |
20min |
|
最大速度 |
10m/s |
|
整机尺寸 |
1.98m×1.98m×0.7m |
|
悬停精度 |
垂直:±0.5m 水平:±1.5m |
|
可选配件 |
|
|
热像仪 |
10mK分辨率 |
|
可见光近红外光谱相机 |
20nm光谱分辨率 |
|
短波红外光谱相机 |
20nm光谱分辨率 |
|
中红外相机 |
多种型号可选 |
|
可见光相机 |
多种型号可选 |

图3 车载平台搭载“AoEagle光电鹰”系统实物图

图4 无人飞艇搭载“AoEagle光电鹰”系统及可见光相机实物图
三、 数据产品
“AoEagle光电鹰”系统能提供原始数据产品、激光点云产品,应用数据产品,也可同平台搭载可见光/红外相机等获取辅助载荷数据产品四种数据产品。

图5 数据产品结构图
l 原始数据产品:包括激光测距数据、组合导航数据(位置、姿态)、GNSS基站数据等。
l 激光点云产品:原始数据通过配套专用软件处理得到绝对大地坐标系下的激光点云数据:
Ø 现场快速处理点云(15分钟内获得,绝对位置精度米级)
Ø 事后精密处理点云(24小时候获得,绝对位置精度2cm±1ppm)
l 辅助载荷数据产品:“AoEagle光电鹰”系统可根据应用需求,选择性搭载可见光或红外相机,获取可见光影像、红外影像等数据。
l 应用数据产品:实际应用中,以激光点云数据为基础、配合辅助载荷数据,通过特征提取、反演、重建得到:三维模型、DEM、DSM、目标分类、目标高度等。
四、 应用案例
(一)多旋翼无人机搭载“AoEagle光电鹰”系统和可见光相机在光电院园区进行了初步测试,利用得到的机载点云、车载点云和可见光图像等数据完成了园区三维重建。
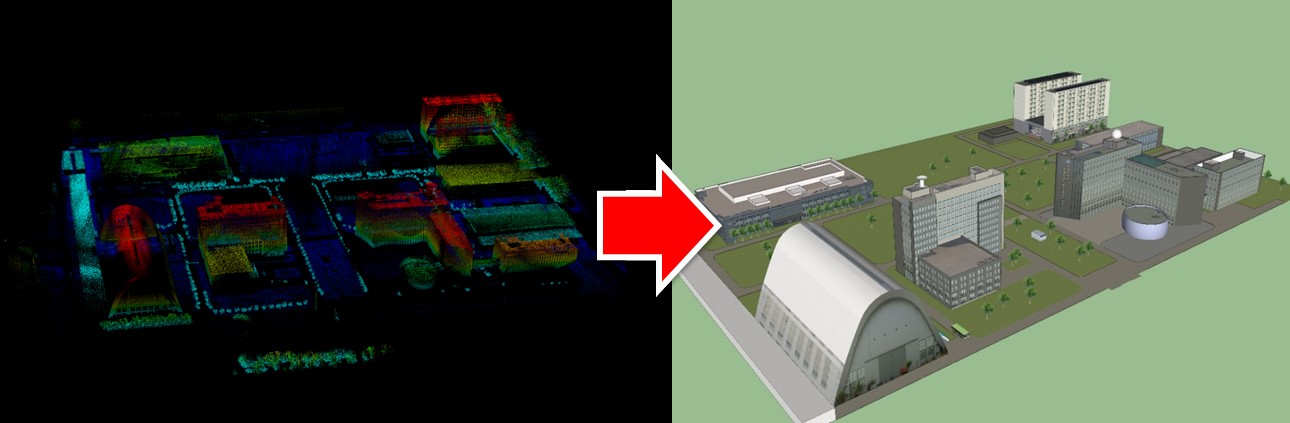
图6光电研究院园区点云数据 图7园区三维重建效果
(二)2016年9月,应宁夏银川市政府邀请,利用“AoEagle光电鹰”系统在该市开展了城市目标三维数据采集飞行试验,获取了居民区、市政大厅、城市周边沙丘变化等典型区域点云数据,为银川智慧城市建设项目提供了数据支撑。
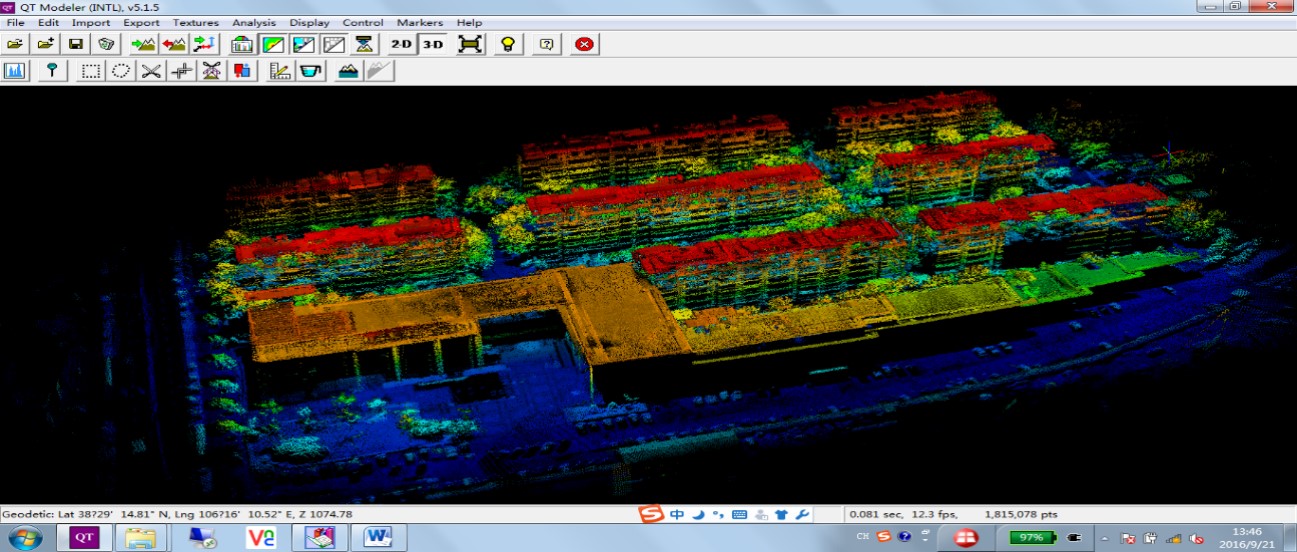
图8城市小区点云数据
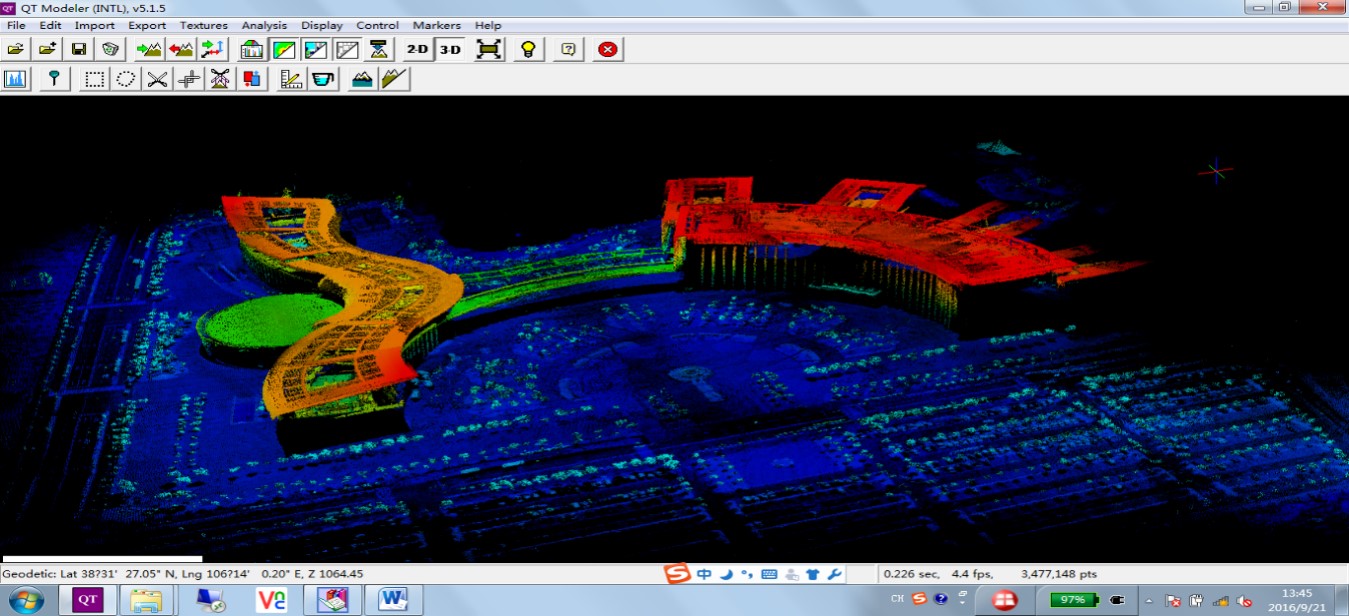
图9 市政大厅点云数据

图10 城市公园点云数据

图11工厂厂房点云数据
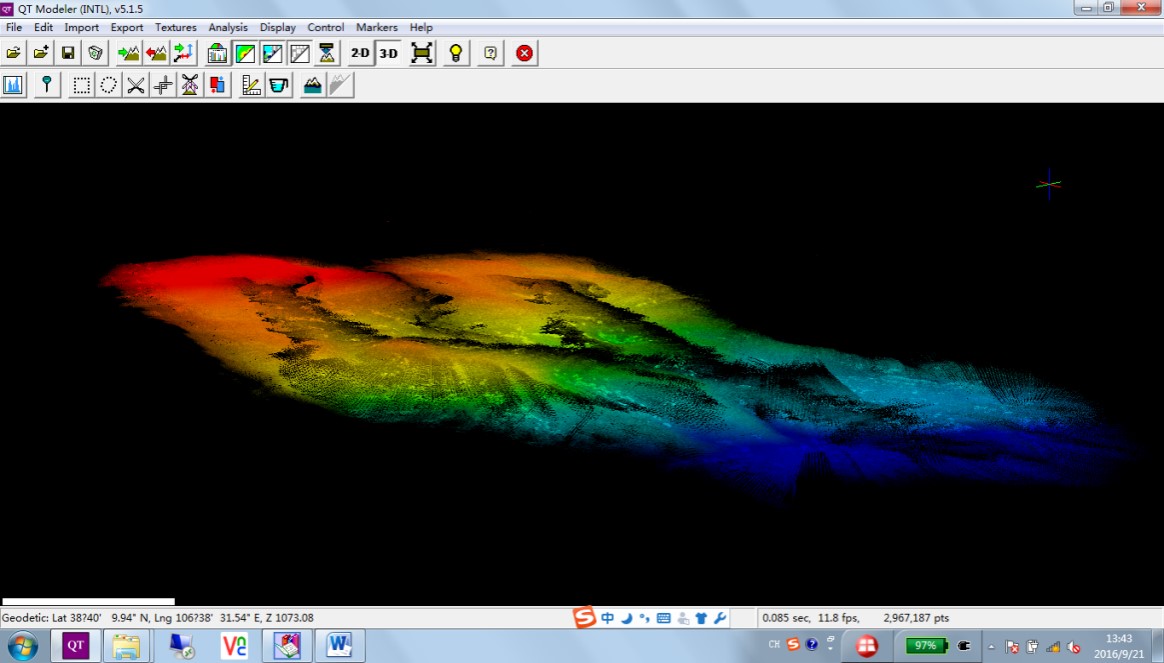
图12 沙漠点云数据
(三)2017年9月,在位于内蒙古四子王旗的中国科学院浮空器飞行试验基地开展了无人飞艇搭载试验,成功验证了微小型、低功耗激光雷达系统的多平台搭载适应性,并利用所获取的点云和影像数据完成了试验基地三维重建,为该基地的三维展示及未来规划提供数据支持。
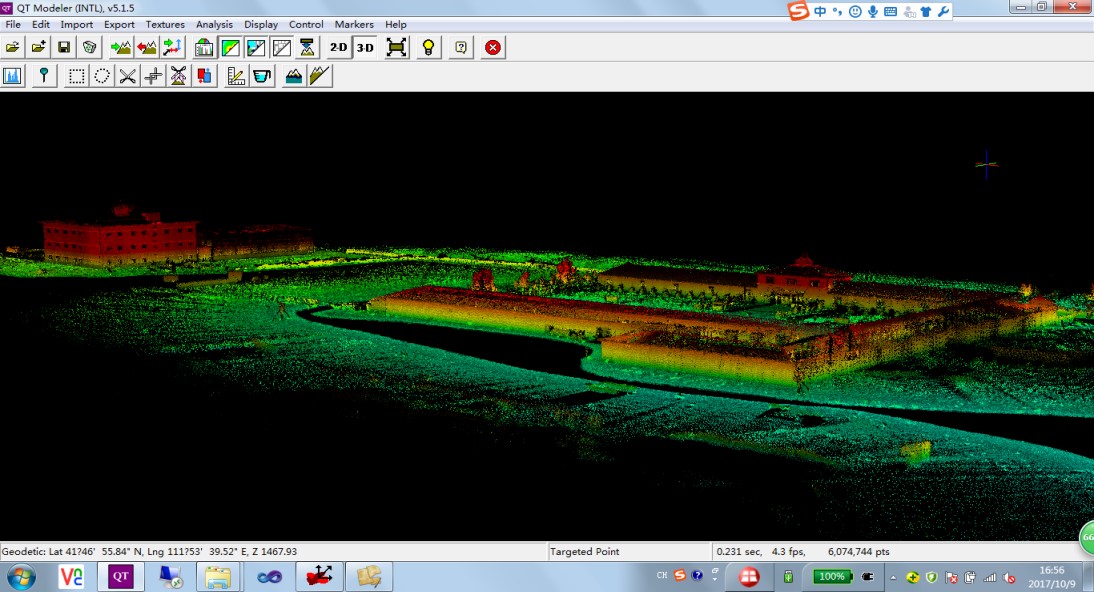
图13 四子王旗浮空器试验基地点云数据

图14 四子王旗浮空器试验基地三维重建效果
2016年1月,应杭州考古部门邀请,“AoEagle光电鹰”系统参与了浙江省杭州市古临安城考古项目,为古临安城海塘遗址的考古挖掘工作提供了技术支持,包括考古现场尺寸丈量、不规则考古坑土方计算、挖掘过程的三维信息记录等。

图15 考古现场无人机航拍图

图16考古现场点云数据
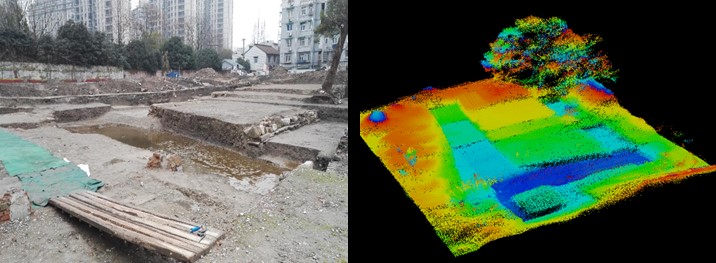
图17 一号坑细节照片及点云数据
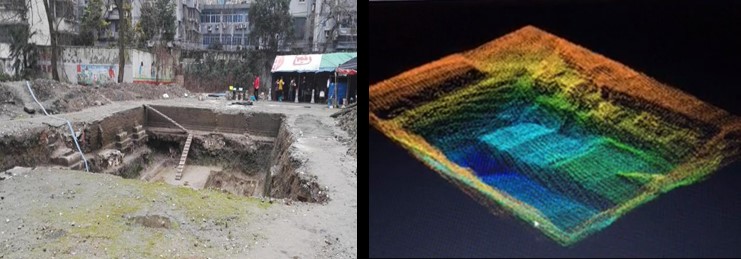
图18二号坑细节照片及点云数据
(一)2016年6月,应蒙西电力公司的邀请,“AOEagle光电鹰”系统在内蒙古呼和浩特市参与了无人机载光学载荷系统电力巡线测试,从测试的所有无人机载激光雷达系统中脱颖而出,成为自蒙西电力公司组织测试以来唯一成功获取清晰电力线信息的无人机载激光雷达系统,成功获得可承接国家无人机载激光雷达系统电力巡线作业的资质,被蒙西电力专家誉为“至今为止最好用的无人机载激光雷达系统”。
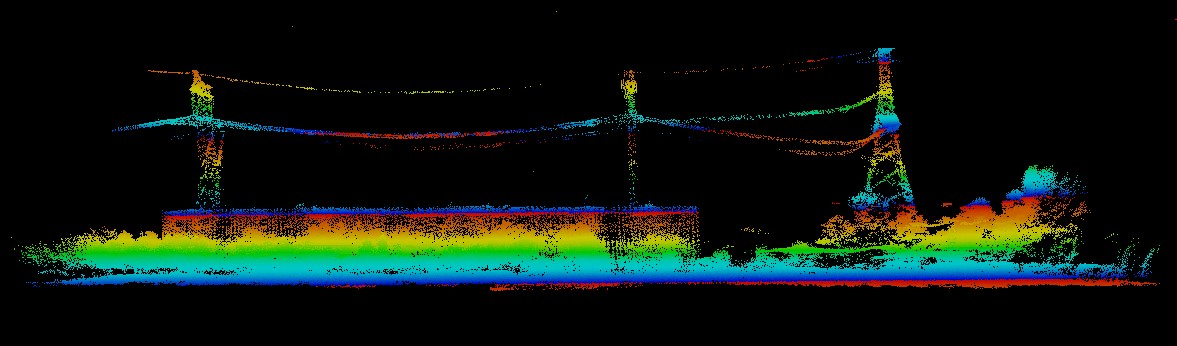
图19电力塔及线路点云数据
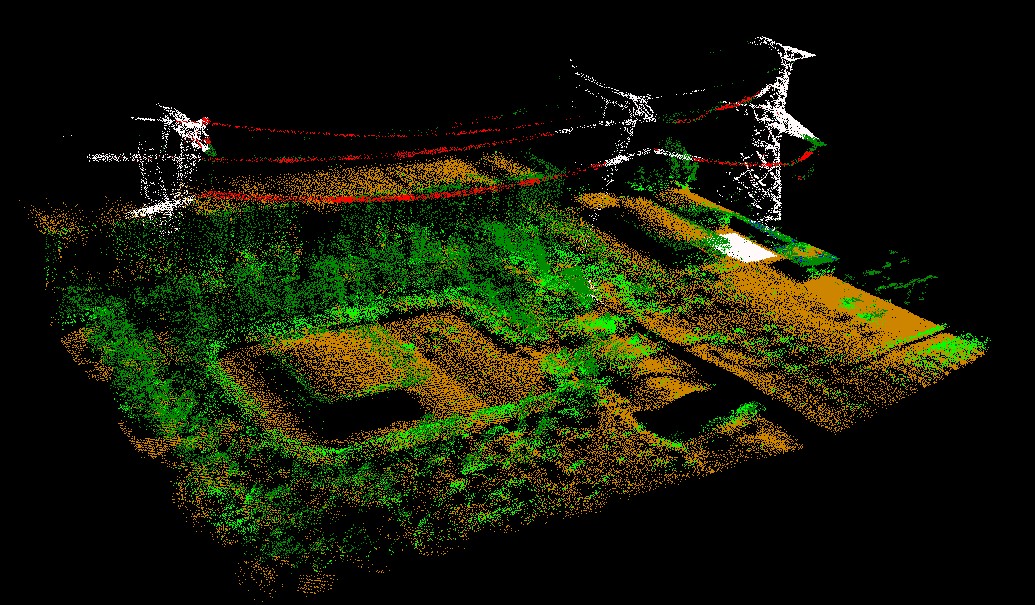
图20仅基于点云数据的地物分类图

图21仅基于点云数据的电力塔信息提取
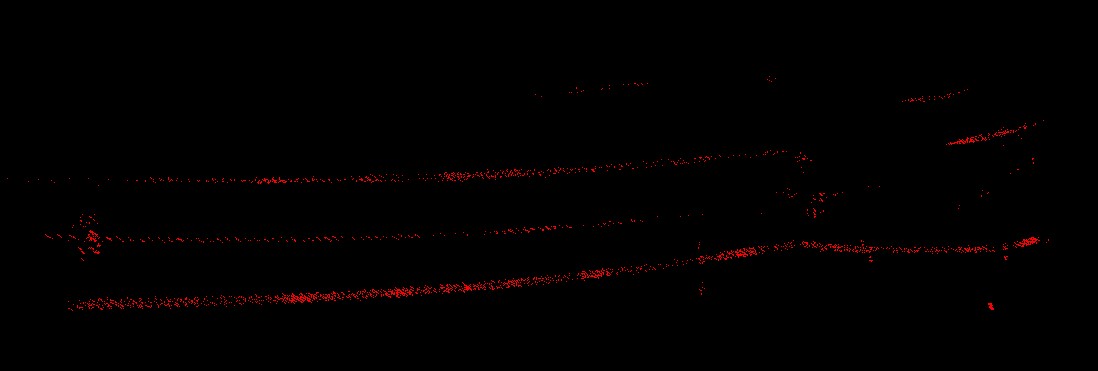
图22仅基于点云数据的电力线信息提取
(二)2016年9月至11月和2017年3月至4月,应国家电网邀请,在四川西昌开展锦苏特高压巡线试验,克服山区地形复杂、天气多变等诸多不利因素,顺利完成121级(50.8KM)电力线、电力塔的巡查,利用相关数据成功提取电力线、电力塔、地面、植被等关键信息,并生成电力线走廊数字高程模型(DEM)、数字表明模型(DSM)等产品,相关成果为国家电网特高压线路的安全隐患排查工作提供了有力技术支撑,得到用户高度赞誉,获得国家电网历史上首张无人机载激光雷达电力巡线任务订单。
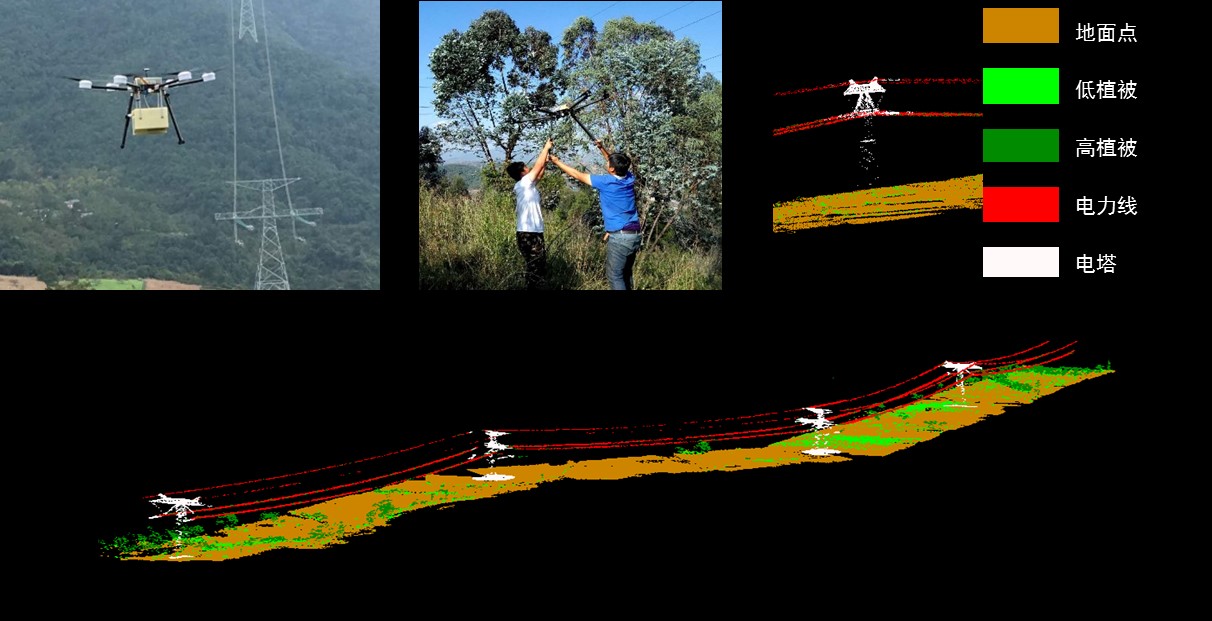
图23点云数据及分类目标图示
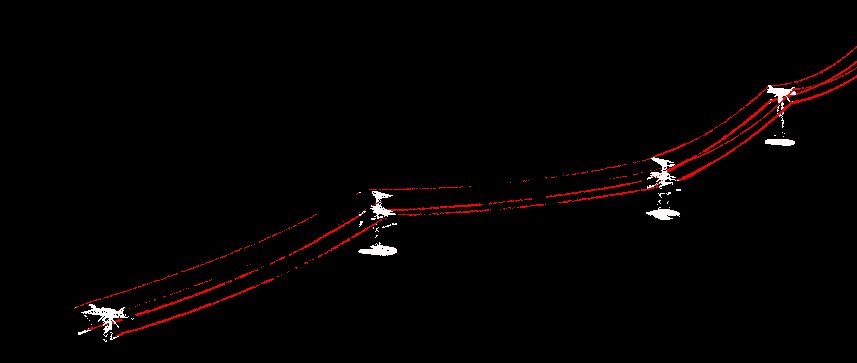
图24电力线、电力塔信息提取
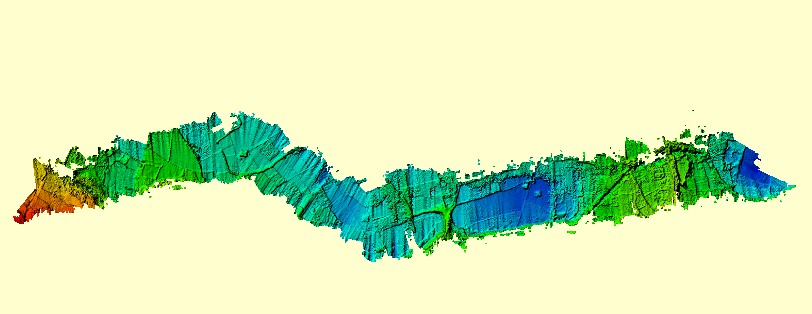
图25电力线走廊DEM(颜色代表高程信息)

图26电力线走廊DSM(颜色代表高程信息)
(一)2016年6月,在内蒙古呼和浩特林地开展了针对北方林地的应用示范、获得目标区域DEM、DSM、CHM、郁闭度、叶面积指数、单木等。
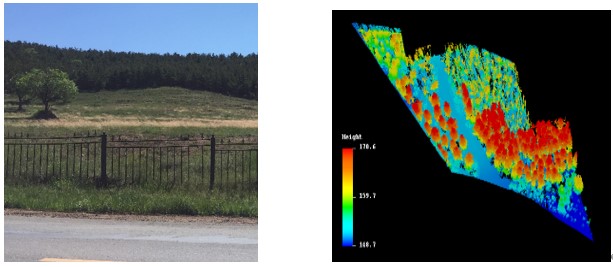
图27 北方林地(玉泉区)试验现场 图28北方林地(玉泉区)点云
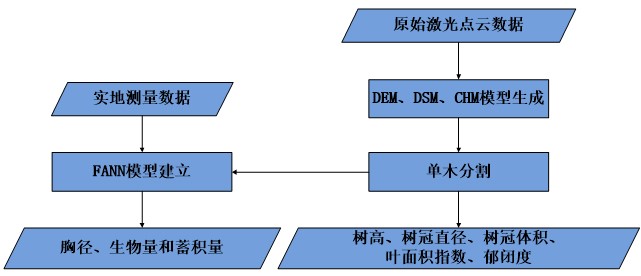
图29林业应用处理流程
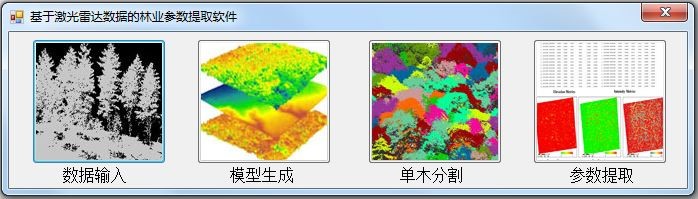
图30林业应用处理软件
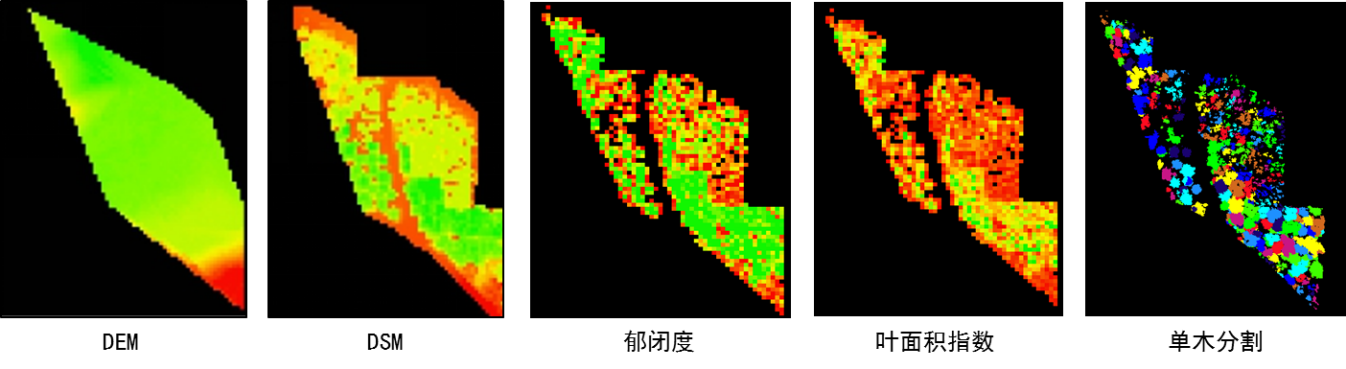
图31目标区域DEM、DSM、郁闭度、叶面积指数、单木分割结果
(二)2016年7月、11月,应福建尤溪林业局邀请,先后两次开展针对南方地区林地的林业资源调查应用试验。两次试验共计完成9个林业样地的数据采集、相关数据点密度达500p/m2,从中提取了样地DEM、DSM、郁闭度、叶面积指数等关键参数,并进行了样地内单木的树高、胸径、树冠及蓄积量等参数反演。对福建省第四次森林资源调查工作提供了技术支撑。

图32南方林地(尤溪)试验现场
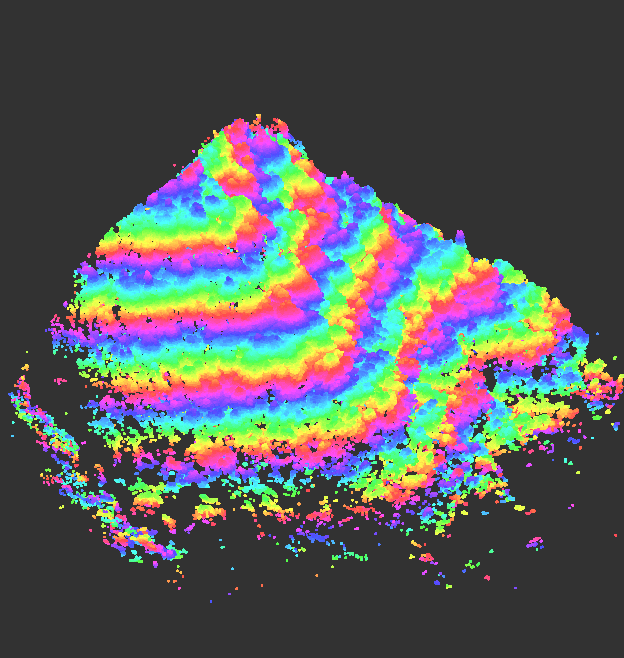
图33南方林地(尤溪)原始点云
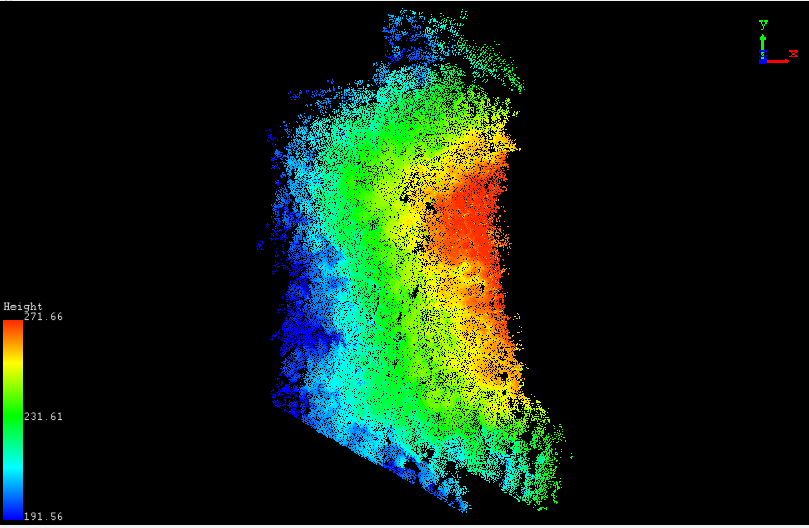
图34南方林地(尤溪)原始点云(天顶视角)
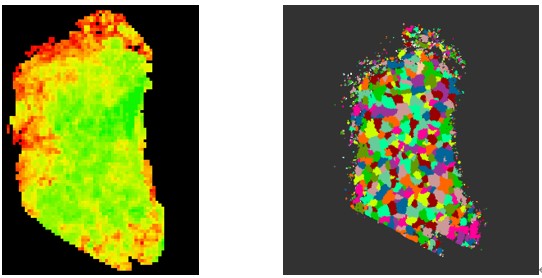
图35冠层高度模型(CHM) 图36单木分割
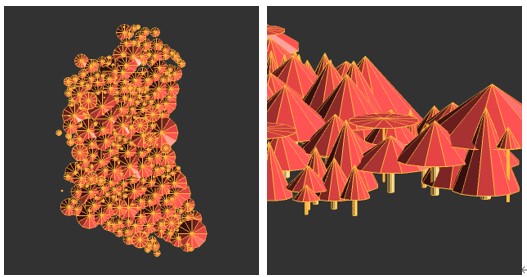
图37 树木细节层次三维模型(LOD2模型)
(伞顶点高代表树高,开伞大小代表树冠直径)
使用“AoEagle光电鹰”系统点云数据反演得到的林分参数与人工测量值接近(如下表3所示),受到了国家林业局华东院和尤溪县林业局有关专家的高度认可和赞誉,认为该系统可为后续我国林业资源调查提供新的革命性技术手段。
表3 样地反演结果与人工测量对比
|
|
每亩株树 |
树高/m |
胸径/cm |
|
反演结果 |
94.61264 |
25.37659 |
25.14604 |
|
人工测量值 |
95 |
23.5 |
21.1 |
(三)2017年5月,应芬兰FGI的邀请,前往芬兰坎塔海梅区(Kanta-Häme)海门林纳市(Hämeenlinna)埃沃(EVO)标准森林试验场,对亚寒带森林区域的不同植被开展了中芬联合研究试验。

图38埃沃(EVO)试验现场及亚寒带植被点云数据
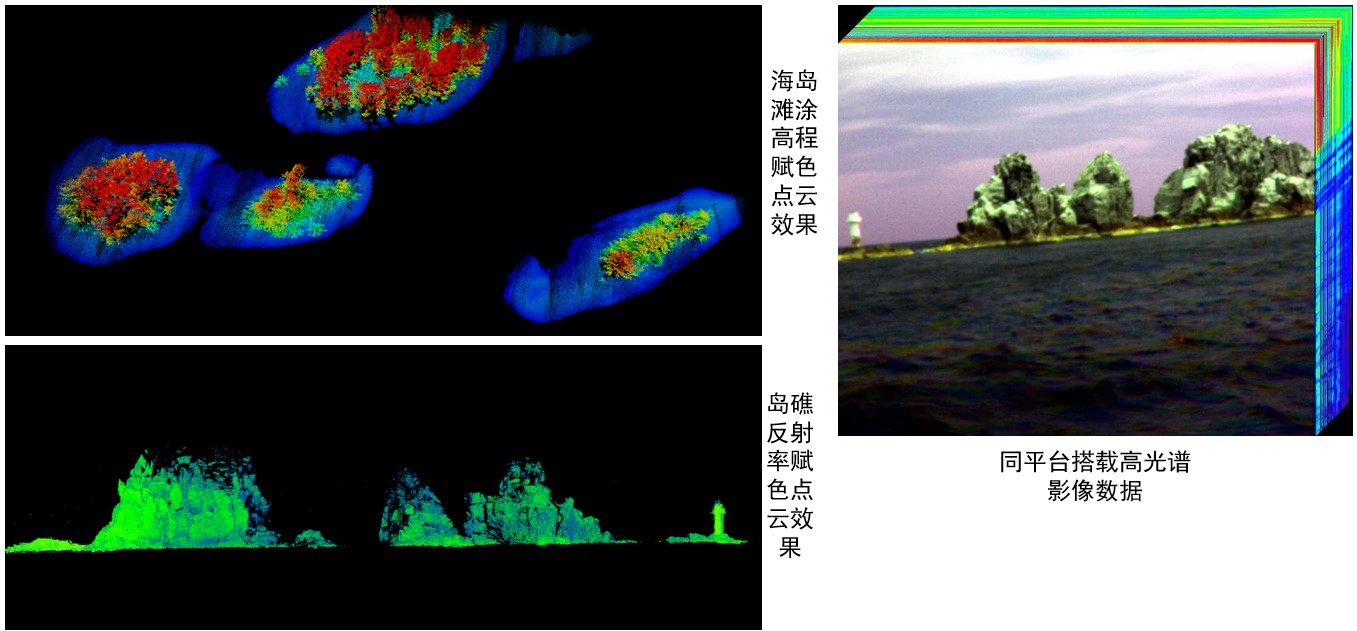
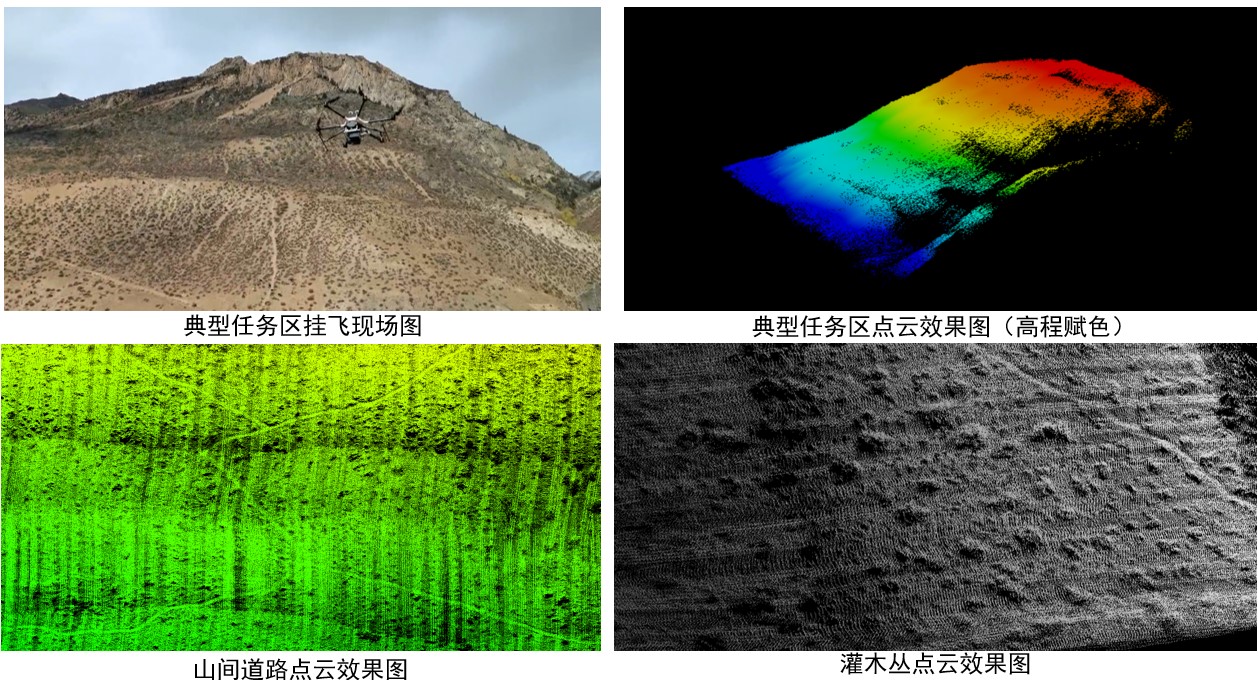
2020年10月-2021年7月,实现了3700-4700m海拔环境下两期激光雷达点云数据获取,验证了轻小型无人机载激光雷达监测系统在高原环境的性能,并利用上述数据进行了地灾隐患区地形图、土方量、数字表面模型等信息的提取,为川藏铁路规划提供了有效支撑。
2019年10月-2021年6月,实验室承担了某重点研发项目中子课题“轻小型多维成像系统无人机搭载改造技术”,试验中实验室人员基于轻小型多维成像系统获取的地表反射率波谱信息、图像空间信息和三维坐标信息,实现了对岛礁典型地物目标的精细分类,为岛礁和海上构筑物三维信息提取以及地形地貌信息提取提供了数据支撑。